2017年10月18日更新協働ロボットとは何ですか?
人と同じ作業スペースで稼働するロボットで、人に危害を加えるリスクが規格に沿って低減されているロボット、それが協働ロボットです。
ロボットの安全に関する規格では、以下のように定義されています。
「a robot designed for direct interaction with a human within a
defined collaborative workspace」 (引用:ISO 10218-2:2012)
「規定された協働作業空間で、人間と直接的な相互作用をするように
設計されたロボット」 (引用:JIS B 8433-2:2015)
従来の産業ロボットでは、柵や安全装置などにより、人とロボットの作業空間が分けられていることが原則です。つまり、ロボットが動いている時は、同じ作業スペース内に人はいない状態、もしくは、人が近付いたらロボットは止まる、ということです。
人と産業ロボットの作業スペース例 その1
ロボットは柵で囲まれ、ロボットが動いている間は、人はロボットに近づくことは出来ません。
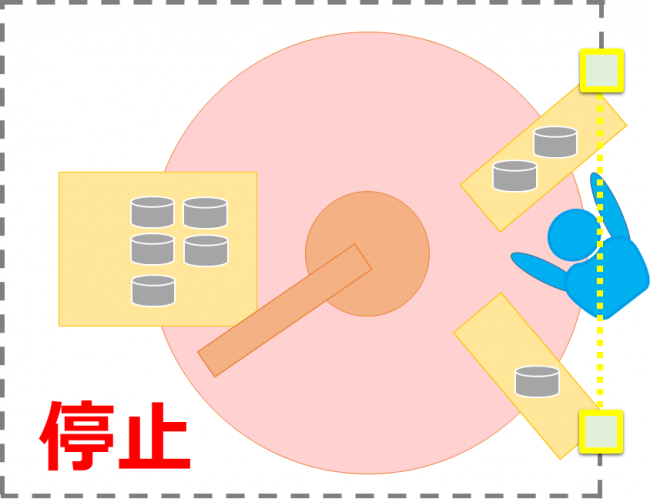
人と産業ロボットの作業スペース例 その2
人が作業エリア内に入っている間は、例えばライトカーテンなどの安全制御装置がロボットの停止を監視します。
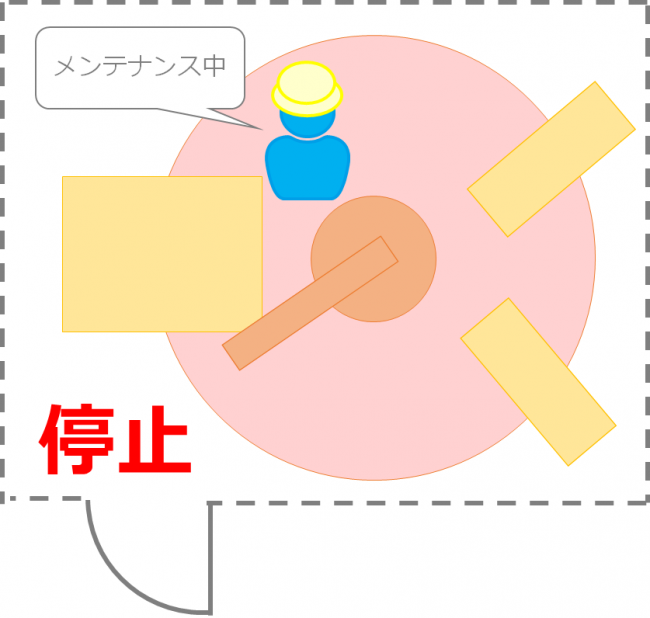
人と産業ロボットの作業スペース例 その3
メンテナンスや清掃などで、人がロボットの作業スペース内に入るときも、柵が開いている状態を検知して、ロボットの停止は保たれます。
上記のように、人とロボットの作業スペースが分けられているのが、産業ロボットと行う安全な作業です。
産業ロボットに関する安全規格EN ISO 10218-2では、ロボットとの衝突による危害が人に及んではいけないということが定められています。それでは、ロボットと人の衝突が、危害の及ばないレベルだったら、どうなのでしょう…?
そこでは、人とロボットが同じエリアで作業を行うことが実現します。つまり人とロボットの協働作業です。
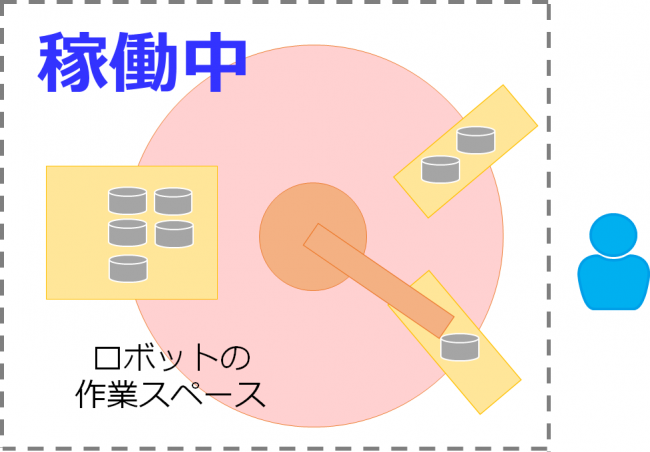
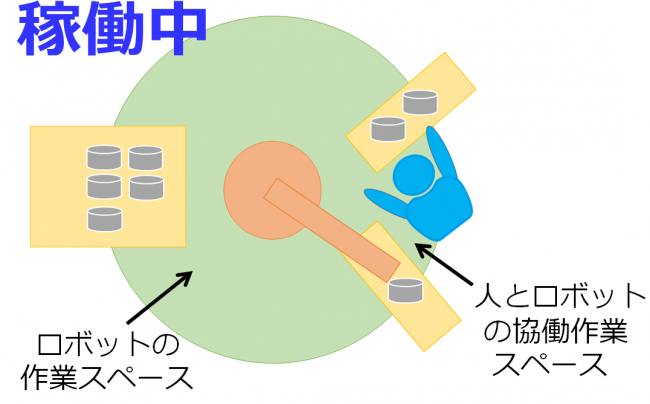
人と協働ロボットの作業スペース例
ロボットを囲う柵はなく、人とロボットが同じ作業スペースで、同時に作業を行います。これが、人と協働ロボットとの協働作業です。
協働ロボットは、以下の条件を満たしています。
- 人に危害を加えない構造になっている(本質的安全)
- 衝撃を検知できる安全システムが組み込まれている
- ロボットの安全規格をとっている
安全規格EN ISO 10218-2(産業ロボットに関する安全規格)と ISO/TS 15066(協働ロボットの技術仕様書)では、協働ロボットと人による作業方法を、以下の4つのタイプに分けています。これらの方法をMethod(メソッド)と呼び、人と協働ロボットの作業は、これら4つのうちのどれか、もしくは組み合わせによるものになります。
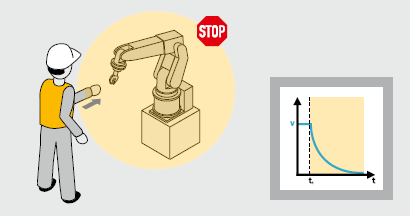
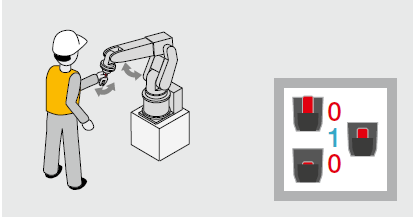
Method 1 - Safety-rated monitored stop(安全監視機能による停止)
協働作業スペースに人が入ると、ロボットは安全に停止します。人がそこから離れると、ロボットは自動で動作を再開するか、もしくはリセットにより再開します。その速度については、リスクアセスメントを行うことにより決定されます。
Method 2 - Hand guiding(ハンドガイド)
安全に減速された速度で、ロボットにハンドガイドを行うことができます。その速度は、リスクアセスメントを行うことにより決定されます。また、安全性評価が済んでいるイネーブルスイッチや緊急停止ボタンが、手の届く位置にある必要があります。
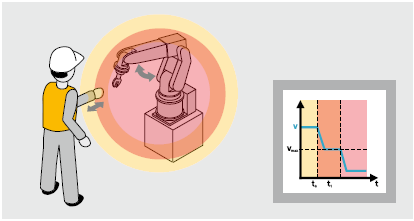
Method 3 - Speed and distance monitoring(速度と距離の監視)
人がいつでも安全にロボットに近づけるように、固定式ではない柵が設置されています。危険エリアは常に監視され、それに応じて速度が調整されます。人が協働作業スペースから離れると、ロボットはリセットされることなく動作を再開します。
Method 4 - Power and force limiting(力と圧力の制限)
ロボットを囲う柵はないため、人とロボットが衝突する可能性があります。そのため、ロボットに対する追加の条件が必要になります。義務付けられた安全機能の他にも、トルク、圧力、力、速度が安全に監視されなければなりません。
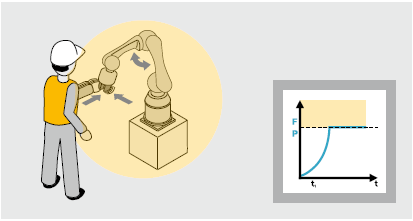
ISO/TS 15066 では、衝突の際の「力」と「圧力」の制限値が定められています。
協働ロボットが使われる現場では、オペレーターとの衝突という危険の可能性があります。そして、その衝突が、ISO/TS 15066の制限値に従っていることを確かにすることが重要で、それには、協働ロボットの衝突についての確実な評価を行うことが必要です。
・・・では、どうやって?
それは、実際に衝撃を計測すること、となります。
記事一覧
- はさまれ・巻き込まれ事故のその後
- EC自己宣言書って何ですか?
- 食料品製造業の死傷災害 ~平成25年の安衛則改正の効果は?~
- はさまれ・巻き込まれ事故に関するシリーズを終えるにあたり
- 「安全道場」訪問レポート
- はさまれ・巻き込まれの災害防止につながる安全措置とは?~速度監視アプリケーション例
- はさまれ・巻き込まれの災害防止につながる安全措置とは?
~停止監視アプリケーション例(後編)~ - はさまれ・巻き込まれの災害防止につながる安全措置とは?
~停止監視アプリケーション例(前編)~ - 「はさまれ・巻き込まれ事故」に関する法律や規則について教えてください。
- はさまれ・巻き込まれ事故はどのように起きてしまっているのですか?
- 製造業のはさまれ・巻き込まれ事故って減っているんですか?
- 協働ロボットとは何ですか?
- 「機械の包括的な安全基準に関する指針」とは?
- 国際規格のJIS化とは?
- ニューアプローチ指令って何ですか?
- EC指令とは何ですか?
- EN規格って何ですか?
- CEマーキングを表示するために必要なこととは?
- ヨーロッパの製品に良く見かけるCEマーキング。これって何?