2018年7月12日更新はさまれ・巻き込まれの災害防止につながる安全措置とは?
~停止監視アプリケーション例(後編)~
はさまれ・巻き込まれによる災害を防止するにあたり、設計の段階で安全な機械設備を実現できることが理想ですが、危険源をすべて無くすことはなかなか難しいため、残ってしまった危険源に対して、追加の安全保護方策を行うことが機械安全では大切です。
安全保護方策には、「動いている機械」と「人」が接触しないように安全装置を活用するという方法があります。そのアプリケーション例として、先月号では「安全リレーを使った停止監視」の例をご紹介しました。今月はその後編として、「安全コントローラを使った停止監視」のアプリケーション例をご紹介します。
ほとんどの機械において、機械の動作を停めるための「停止機能」が組み込まれていることと思いますが、極端な話、家電製品でも電源コンセントを引き抜いてしまえば、電源が切れて動作が停まり機械は動かなくなります。国際規格では、安全に機械の動作を停める停止機能についてが定められていまして、まずはアプリケーション例の前に、安全停止機能について少し触れたいと思います。
国際規格IEC 61800-5-2(可変駆動システムの機能安全規格)では、ドライブの安全停止機能について定義をしています。複数ある停止機能の中でも、押さえておきたい3種類の安全停止機能がこちらです。
① STO(Safe Torque Off)安全トルク遮断
動力が機械のアクチュエータに供給されるのを即時遮断します。停止動作は制御されていません。現在のサーボアンプにはSTO機能が組み込まれているものが増えてきました。予期せぬ起動の防止や、危険時の安全なシャットダウンが行えるようになっています。
 S = 距離 T = 時間 V = 速度
S = 距離 T = 時間 V = 速度
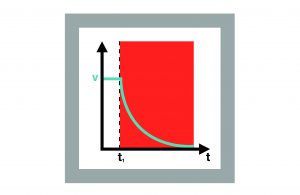
② SS1 (Safe Stop 1) 安全停止1
制御された停止を行うために、動力は機械のアクチュエータに供給されたまま停止(減速)が開始します。そして、モーターの停止後に動力が遮断(=STO)されます。
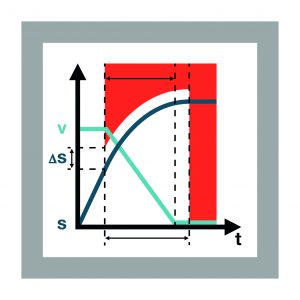 S = 距離 T = 時間 V = 速度
S = 距離 T = 時間 V = 速度
③ SS2 (Safe Stop 2) 安全停止2
制御された停止を行うため、動力は機械のアクチュエータに供給されたまま停止(減速)が開始します。停止後も、その状態を保つため、動力は供給され続けます。
SS2機能の利点は、モーターが停止している間も動力をシャットダウンしなくて良いという点です。工程とモーターの動きは一致したままですので、いつでも再稼働できます。通常停止と比べて、このSS2のロスのない停止は、稼働率にも大きく貢献します。
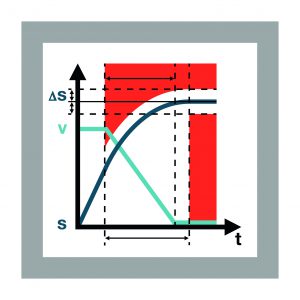 S= 距離 T = 時間 V = 速度
S= 距離 T = 時間 V = 速度
ちなみに、上記①~③の3つの安全停止機能は、IEC 60204-1が定義する停止カテゴリーに相当しています。

これらの安全停止機能がサーボアンプに備わっていれば良いのですが、これらの安全機能が備わっていない一般のサーボアンプの場合、安全停止機能を持っている安全装置を使用することで、要求される安全のレベルを達成することができます。
そこでご紹介したいのが、安全コントローラを使用した停止監視の例です。
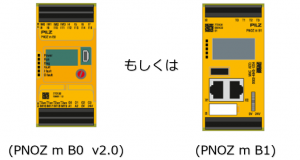
ここで使用する安全コントローラは:
「小型安全コントロールシステムPNOZ m B0 バージョン2.0」(左)もしくは、
「小型安全コントロールシステムPNOZ m B1」 (右)です。
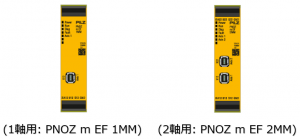
加えて、「安全モーション監視用モジュール」を使用します。こちらは、安全コントローラの増設モジュールで、監視する軸に合わせられるように、1軸用(左)と2軸用(右)があります。最大6個まで使用できるため、その場合12軸までの監視が可能です。ISO 13849-1に定められているパフォーマンスレベル「PL e」、IEC 62061で定められている安全度水準「SIL 3」に対応しています。
そして、3点目として、コンフィグレーションをするためのソフトウェア 「PNOZmulti Configurator バージョン10(以降)」が必要となります。
これらの安全機器を使用しますと、先述のSS1(安全停止監視1)とSS2(安全停止監視2)に加えて、以下の安全停止機能も実装させることが出来ます。

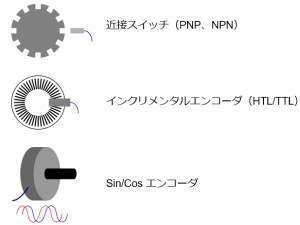
但し、安全コントローラを使って停止監視を行う場合、検出のためのセンサとして①近接スイッチ、もしくは、②インクリメンタルエンコーダのどちらかが必要となります。
<監視のためのセンサ例>
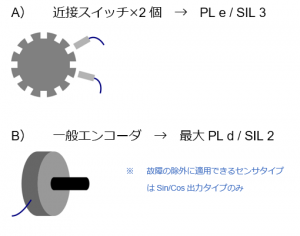
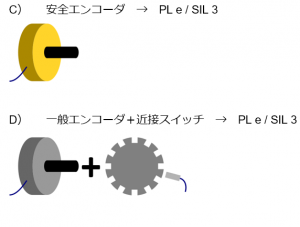
<検出センサとコンフィグレーションの例>
これら上記のコンポーネントを用いて、停止監視の機能を実装させることができます。こちらが、そのアプリケーション例です。
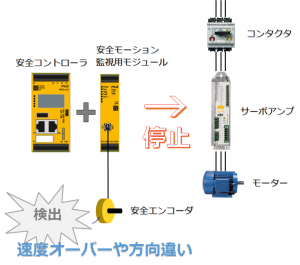
作業行程中に、「速度オーバー」や「方向違い」などの停止要因が発生すると、安全モーション監視用モジュールが停止要因を検知し、それを安全コントローラが判断して、停止の指示をサーボアンプへ出します。その信号を受けたサーボアンプが、停止機能に応じた安全な停め方でモーターを停めるという仕組みです。
先月と今月に渡り、停止監視のアプリケーション例をご紹介させていただきました。はさまれ・巻き込まれ事故の防止のために、「人」と「動いている機械」の接触が起きないよう、物理的なガードの設置に加え、「STO」「SS1」「SS2」といった安全停止機能を活用することは、大変有効的です。より安全な現場づくりのための機能安全について、詳しい説明をご希望の場合は、当社までいつでもお問合せください。
記事一覧
- はさまれ・巻き込まれ事故のその後
- EC自己宣言書って何ですか?
- 食料品製造業の死傷災害 ~平成25年の安衛則改正の効果は?~
- はさまれ・巻き込まれ事故に関するシリーズを終えるにあたり
- 「安全道場」訪問レポート
- はさまれ・巻き込まれの災害防止につながる安全措置とは?~速度監視アプリケーション例
- はさまれ・巻き込まれの災害防止につながる安全措置とは?
~停止監視アプリケーション例(後編)~ - はさまれ・巻き込まれの災害防止につながる安全措置とは?
~停止監視アプリケーション例(前編)~ - 「はさまれ・巻き込まれ事故」に関する法律や規則について教えてください。
- はさまれ・巻き込まれ事故はどのように起きてしまっているのですか?
- 製造業のはさまれ・巻き込まれ事故って減っているんですか?
- 協働ロボットとは何ですか?
- 「機械の包括的な安全基準に関する指針」とは?
- 国際規格のJIS化とは?
- ニューアプローチ指令って何ですか?
- EC指令とは何ですか?
- EN規格って何ですか?
- CEマーキングを表示するために必要なこととは?
- ヨーロッパの製品に良く見かけるCEマーキング。これって何?